Angular Impulse/Momentum for Rigid Bodies in a Plane (example continued)
Recall eq. (3) ˗ (7L/8) ∫ F dt = M(L/2)(vCxa ˗ vCxb) + (1/12) (ML2) (ωa ˗ ω2) (3)
Use kinematics to relate linear and angular motion. i.e.
vCxa = (L/2) ωa , vCxb = (L/2) ω2 and put into (3) and divide by L
˗ (7/8) ∫ F dt = ½ ML[( ½ ωa ˗ ½ ω2 )] + (1/12) (ML) (ωa ˗ ω2) or
˗ (7/8) ∫ F dt = (1/3) ML( ωa ˗ ω2 )
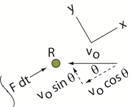
Next apply the principle of linear impulse and momentum to the baseball.
∫ F dt = m( vRxa ˗ vRxb) and m( vRya ˗ vRyb) = 0 or
∫ F dt = m( vRxa + vo cos θ) and m( vRya ˗ vo sin θ) = 0
So (7/8)∫ F dt = (7/8)mvRxa + (7/8)m vo cos θ) Therefore
˗ (7/8)m vRxa ˗ (7/8)m vo cos θ = (1/3) ML ωa ˗(1/3) ML ω2 (4)
Eq. (4) contains two unknowns: vRxa and ωa So you need more information.
During impact the relative velocity after impact relates to that before impact by the
coefficient of restitution.
e = ˗ (vExa ˗ vRxa) / (vExb ˗ vRxb)
Next use kinematics to express vExa and vExb in terms of ωa and ωb = ω2
Note: ωb = ω2 so e = ˗ [(7/8L)ωa ˗ vRxa] /[ (7/8L)ω2 ˗ vRxb] (5)
Click here to continue with this example.
Return to Notes on Dynamics
Copyright © 2019 Richard C. Coddington All rights reserved.