|
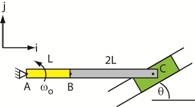
Solution: aB = aA + aB/A |n + aB/A|t = ˗ ωo2 L i + αAB
x L i =
˗ ωo2 L i
aC = aB + aC/B |n + aC/B|t =
˗ ωo2 L i
˗ ωBC2 (2L) i
+ αBC k x 2L i
aC = ( ˗ ωo2
L ˗ 2L ωBC2) i +
( 2L αBC ) j
Since
the slider is constrained to move along the guide aC =
aC ( cos
θ i +
sin θ j )
So aC
( cos θ i +
sin θ j ) =
( ˗ ωo2 L ˗ 2L ωBC2) i +
( 2L αBC ) j
Equate
scalar components: aC cos θ
= ˗ ωo2
L ˗ 2L ωBC2
and aC
sin θ = 2L
αBC =
aCy
From
the relative velocity equation (for this example previously
calculated) ωBC
= ˗ (1/2) ωo
giving aC =
˗ 3Lωo2 sec θ / 2 and aCx =
˗ 3Lωo2 / 2
Now
from aC sin θ = 2L αBC ,
αBC = (˗ 3Lωo2
/ 2 ) tan θ / 2L = ˗ (3/4) ωo2
tan θ
αBC
= ˗ (3/4) ωo2
tan θ k rad/sec2 (result)
Therefore
aCy =
˗ (3/2) Lωo2 tan θ
aC =
˗ 3Lωo2 / 2 i +
˗ (3/2) Lωo2 tan θ j ft/sec2 (result)
|