Relative Acceleration
for Links with 2 points in the same Link
|
All rights reserved.
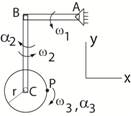
Relative Acceleration
for Links with 2 points in the same Link
|
All rights reserved.