|
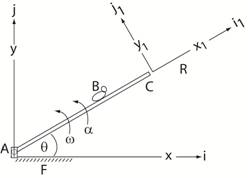
Example: To illustrate coordinate transformation
consider a bug B crawling outward at a speed
vo and an acceleration ao
relative to the rotating arm, AC.
In the position shown: θ
= 30o,
ω = ωo
k = 2 k rad/sec, α = αo
k = 4 k
rad/sec2, AB =
ro =
5 ft, vo = 3 fps, ao = 10 fps2
Let xy be a fixed
frame of reference, F, with origin A and unit vectors i
and j . Let x1y1 be a
rotating
frame of reference R attached to the
rotating arm AC with origin C and unit vectors i1, j1 .
Find
the velocity of the bug with respect to the fixed frame of reference F.
|