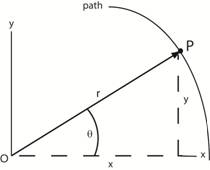
Kinematics of a
Particle in a Plane Click here to
skip to the Polar Description
v
= dr /dt = dx/dt i + dy/dt j = velocity vector of particle at point P at
any time t The
magnitude of the velocity, | v
|, is called speed. It is a scalar. a = dv /dt = d2x/dt2 i + d2y/dt2 j
= acceleration vector of
particle at point P at any time t For
rectilinear motion (path is a straight line), the acceleration might be given
in terms of 1.
time, t 2. speed, v 3. position, x For
a given the acceleration, integration
gives speed and position, say along x-axis. NOTE: By the chain rule a
= dv/dt = (dv/dx) (dx/dt) = v
dv/dx Click
here for a refresher on dot and vector-products. Click
here for examples. Click here to
continue with the intrinsic description. |
Copyright © 2019 Richard C. Coddington
All rights reserved.