Kinetic Energy of a Body in a Plane
Key Concepts: A rigid body in a plane may both translate and rotate. Consequently its total
kinetic energy must account for both translation of the center of mass and rotation about its
center of mass. Mass and mass moment of inertia enter into the calculation of kinetic energy.
In a Nut Shell: Kinetic energy is a scalar. So add the translational and rotational kinetic energy
directly to obtain the total kinetic energy for plane motion.
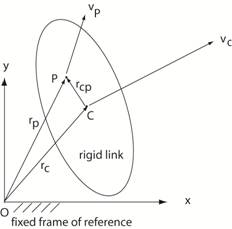
By vector addition: rP = rC + rCP = position vector of P at any time t . P is an arbitrary
point in the rigid body, C is at the center of mass of the body. See the figure below.
Now take the derivative of each vector with respect to time in the fixed frame of reference, F.
vP = vC + ω x rCP
The kinetic energy of an element of mass, dm, located at point P is ½ vP . vP dm
Integration yields the total kinetic energy, T.
The result for the total kinetic energy of the rigid body, T (for plane motion) is
T = ½ m vC2 + ½ ICzz ω2
KE of translation + KE of rotation
where m is the mass of the rigid body concentrated at its center of mass
vC is the speed of the center of mass of the body measured in the fixed frame of reference
ICzz is the mass moment of inertia of the body about its center of mass
ω is the angular speed of the rigid body measured in the fixed frame of reference
Click here for examples.
Return to Notes on Dynamics
Copyright © 2019 Richard C. Coddington All rights reserved.