|
Strategy: Obtain
the relative acceleration equation by taking the time derivative of
each term in
the
relative velocity equation in the fixed frame, F i.e.
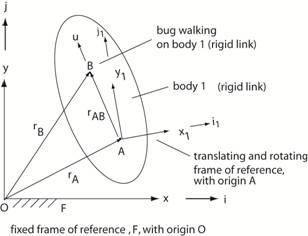
vB = vA
+ vB|1 + ω x rAB
where vB is the velocity of point B with respect to
the fixed frame F
vA is the velocity of point A with respect to
the fixed frame F
vB|1 is the velocity of B with respect to A in x1y1
frame
ω
x rAB
is the velocity of point B with respect to point A in the fixed
frame F
ω
is the angular velocity of body 1 in the fixed frame F
See
the figure below.
|