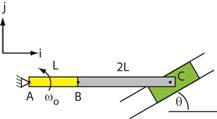
Example:The planar mechanism shown below
consists of two rigid links, AB of length L and BC of length 2L, pinned
at A, B, and C.The slider ,C,
moves along the guide track at an angle θ.At the
instant shown, link AB rotates
counterclockwise at a constant angular velocity given byω
=ωok rad/sec
.Find the angular velocity of
link BC, the velocity of the slider, C, and the instantaneous center of
link BC.All lengths are in feet.
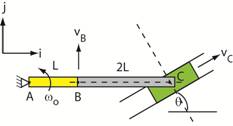
Strategy:Apply the relative velocity equation
between points A and B on link AB and between
B
and C on link BC.Locate the
instantaneous center of link BC by the intersection of lines
perpendicular
to the velocity of points B and C.
Solution:vB= vA+vB/A= vA+ωok
x Li=L ωo j
vC= vB+vC/B= L ωo j+ωBCk x 2Li=( L ωo + 2L ωBC
) j
Since
the slider is constrained to move along the guidevC=vC ( cos
θ i+sin θ j )